October 6, 2017 Control of Raymarine autopilots was added to our gateways
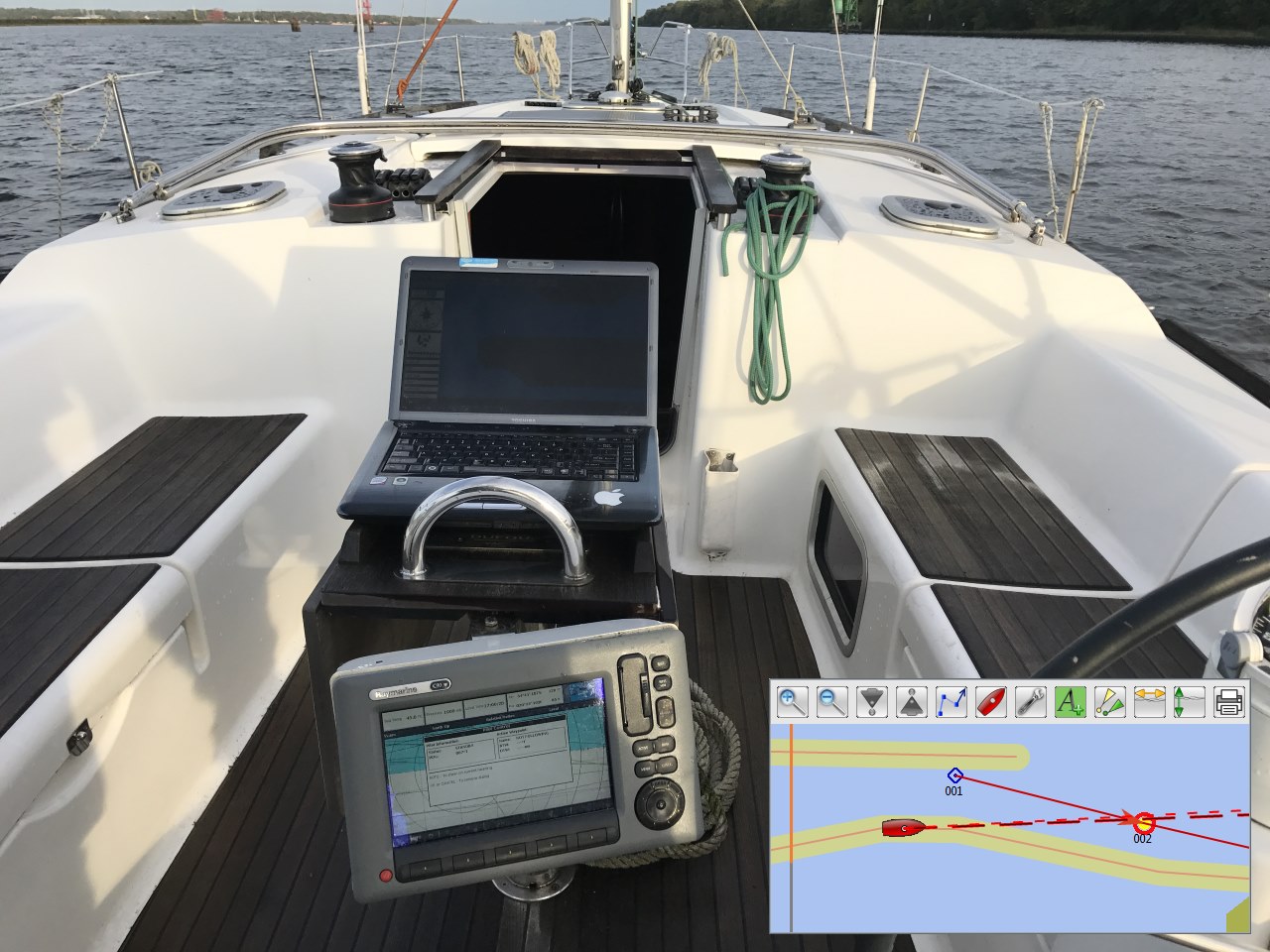
Firmware 1.06 adds the special support of Raymarine autopilots to the USB Gateway, Wi-Fi Gateway and NMEA 0183 Gateway. It allows navigating by a route or to a waypoint from mobile and PC applications by NMEA 0183 protocol. Raymarine SPX30 and EV-1 autopilots were tested in the sea with OpenCPN, a free application.
Many applications (and nearly all mobile apps) still use the old NMEA 0183 protocol despite the fact that in the last decade, most marine electronics are connected by NMEA 2000 (SeaTalk NG in the case of Raymarine, differs from NMEA 2000 in the type of the connectors only).
Our gateways can translate NMEA 0183 sentences to NMEA 2000 messages and vice versa, and support all major autopilot sentences and messages. However, this was not enough to control Raymarine autopilots, because they use some proprietary messages in addition to standard NMEA 2000 messages. In other words, until now only Raymarine equipment (chart plotters and pilot heads) were able to control autopilots connected by SeaTalk NG (NMEA 2000).
The new autopilot control was tested in the sea with two systems using OpenCPN. The first system was popular 5 — 10 years ago and the second is contemporary:
- Raymarine C90W chart plotter, Raymarine SmartPilot SPX30 and Raymarine ST70 Pilot Head;
- Raymarine c125 chart plotter (LightHouse 17), Raymarine EV-1 Course Computer, Raymarine ACU200 Actuator Unit and p70 Control Head.
We expect that autopilot control will also work with all other Raymarine autopilots using the SeaTalk NG interface. However, the Raymarine autopilot control is turned off in the factory settings, and after upgrading the firmware, you will need to read the manual (Chapter IX for NMEA 0183 Gateway, Chapter X for Wi-Fi Gateway, Chapter XI for USB Gateway) to turn it on.
The Raymarine autopilot can by controlled by the application when it is switched to the Auto mode. When the autopilot is in the Auto mode, you can activate a route or waypoint in your application and the autopilot will switch to the Track mode.

Picture 1. Track confirmation at ST70 Pilot Head
Autopilot will ask you for confirmation (see Picture 1) when the waypoint changes. However, the gateways have settings which allow automatic confirmation of these requests (this is also off in the factory settings).
When the navigation is terminated by the application, Gateway returns autopilot to the Auto mode.
It is impossible to switch from the Track mode to Auto manually when the application controls the autopilot, because it will return to the Track mode after a 5-second delay. To take control in an emergency, switch the autopilot to Standby mode.
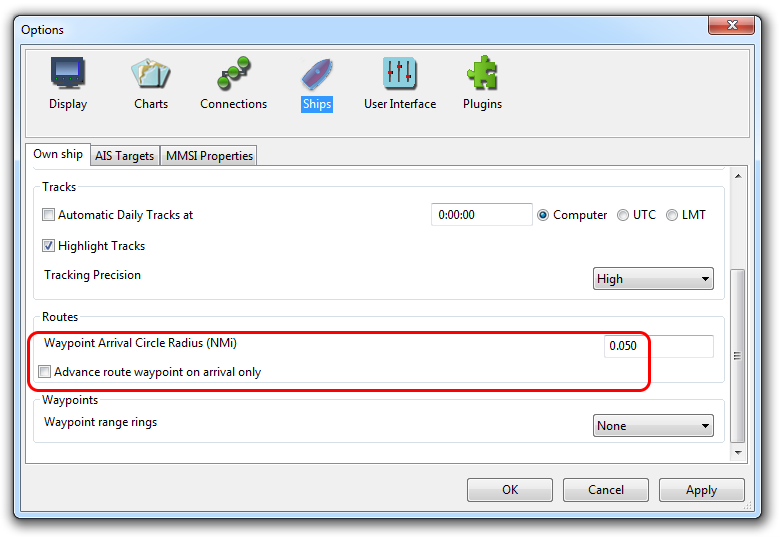
Picture 2. OpenCPN autopilot settings
You must test your application on the open water and be sure that it works with autopilot as expected. In the OpenCPN settings, we point your attention to the "Waypoint Arrival Circle Radius" and "Advance route waypoint on arrival only" settings (see Picture 2).
The autopilot decides what course to steer using the bearing to and position of the waypoint and cross track error (distance between vessel position and a leg line) received from an application along with other data.
However, the application is responsible for switching of waypoints. If your route is circular or approximately so, an application may unexpectedly switch from the first point to the last and you can visit an island against your will.
The new firmware update also have some fixes and is recommended to all users, not only to owners of Raymarine systems. You can download the firmware update for your gateway on the Downloads page. Learn more about USB Gateway, Wi-Fi Gateway and NMEA 0183 Gateway.
Next articles:
- Using Navionics Boating App with NMEA 2000 Wi-Fi Gateway / September 22, 2017
- Update for Engine Gateway YDEG-04 and CAN Log Viewer / September 8, 2017
- J1708 Gateway and amazing review in PBO / August 25, 2017
Previous articles:
- Voyage Recorder PC Software update / October 24, 2017
- Update v1.07 for USB, Wi-Fi and NMEA 0183 gateways / October 30, 2017
- How to set up a pair of Wi-Fi Gateways as a NMEA 2000 wireless bridge / November 7, 2017
See also: recent news, all news...